52 lines
1.9 KiB
Markdown
52 lines
1.9 KiB
Markdown
|
|
# Look at me!
|
||
|
|
|
||
|
|
## 资料:
|
||
|
|
|
||
|
|
+ 官方文档:https://github.com/apirrone/Open_Duck_Mini
|
||
|
|
+ 同济子豪文档:https://zihao-ai.feishu.cn/wiki/HM3WwVsyEiOs4wkfR4McvRaUn5d
|
||
|
|
|
||
|
|
+ 中文详细文档(个人建议看这个):https://www.ncnynl.com/archives/202506/6739.html
|
||
|
|
|
||
|
|
## 安装步骤:
|
||
|
|
|
||
|
|
先在window下配置舵机,在进行硬件组装(提前串联好14个舵机),在连接电路.
|
||
|
|
|
||
|
|
## 注意事项:
|
||
|
|
|
||
|
|
|
||
|
|
+ ##### 树莓派系统安装以及环境配置(VNC Viewer)
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
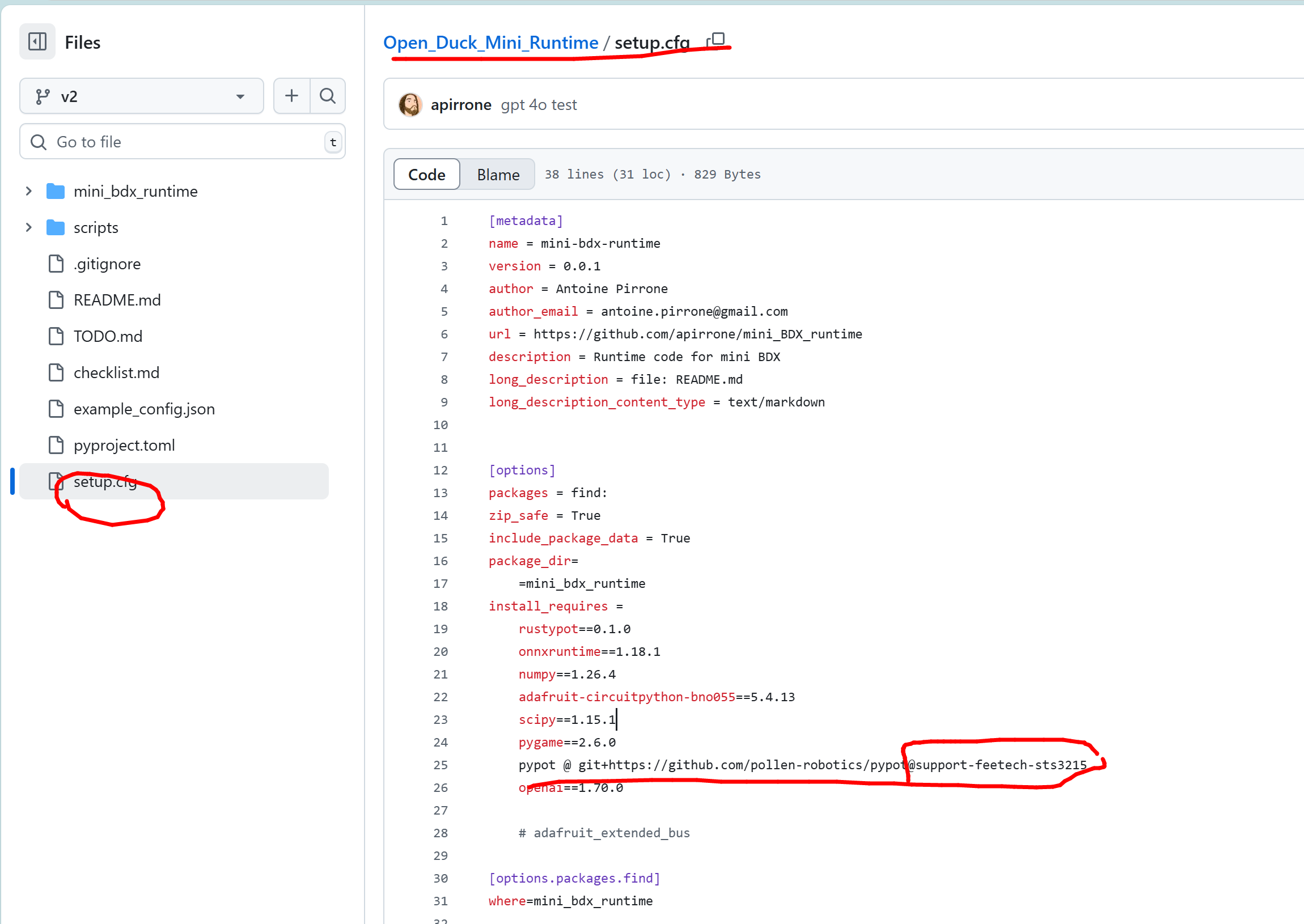
+ **舵机配置时候缺少pypot依赖:**
|
||
|
|
+ **解决方案:**从open_duck_mini_Runtime中的setup.cfg文件发现其余依赖(舵机以来的库),继续将github中的**support-feetech-sts215分支**下载并上传到实验室git,在执行pip install .(待验证,正在尝试windowns下配置舵机)
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
+ **wsl配置舵机**:pip install -e .所需环境(但是执行舵机配置代码失败:ubuntu下无法识别COM3!(建议直接在windowns下配置)
|
||
|
|
|
||
|
|
+ **针对以上问题的解决方案1**:将windown下的串口映射到wsl:
|
||
|
|
|
||
|
|
**windowns端:**
|
||
|
|
|
||
|
|
+ 下载usbipd:[Release usbipd-win 5.1.0 · dorssel/usbipd-win](https://github.com/dorssel/usbipd-win/releases/tag/v5.1.0)
|
||
|
|
|
||
|
|
+ usbipd list查看连接端口(COM3)
|
||
|
|
|
||
|
|
+ usbipd bind --busid 5-1(5-1为对应的BUSID,此时端口STATE转换为shared)
|
||
|
|
|
||
|
|
+ usbipd attach --wsl --busid 5-1(映射到wsl)
|
||
|
|
|
||
|
|
**wsl端:**
|
||
|
|
|
||
|
|
ls /dev/tty*(找到/dev/ttyACM0,它对应于COM3)
|
||
|
|
|
||
|
|
python scripts/configure_motor.py --port /dev/ACM0 --id 33(执行改代码后舵机转动九十度左右)
|
||
|
|
|
||
|
|
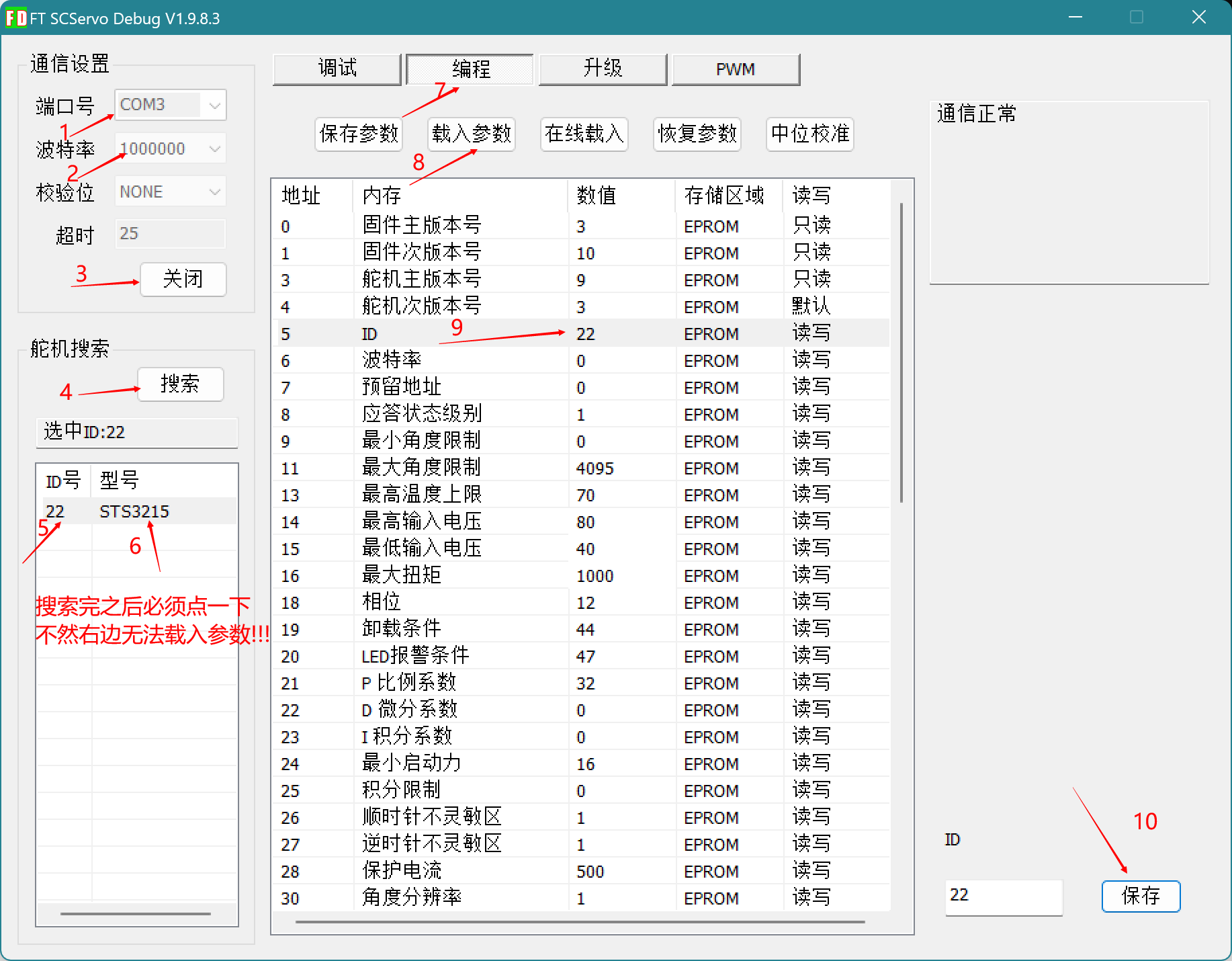
+ **舵机串口调试步骤如下**:
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|